# Mobile Robots
# Introduction
Mobile Robots are increasingly been used to perform inspections for a variety of reasons, such as automatic and semi-automatic tasks, faster execution, increased accuracy, hard-to-reach zones, faster global assessment, or to get an accurate history of the same measured position.
A good example is Genesis, a New Zealand Electricity and gas retailer, Who has a specifically need for unmanned tunnel inspection, in tunnels up to 20 Km.
# Magnetic Adhesion Climbing Robot for weld inspection and corrosion mapping
There are some robots with this configuration in the market, although they are heavy and with not much flexibility. Since the Phased Array probes are not very heavy, we may be able to reduce the robot size, include cameras and weld reinforcement detection. Also, the market solutions are all man controlled, there maybe be an opportunity to some autonomous driving, mainly for corrosion mapping.
The most known market solution is the Navic robot from Jireh industries, a Canadian company. The details are at the link below: https://www.jireh.com/products/category/navic/
This kind of solution can avoid the scaffolding and IRATA inspection, which are less safe and costly.

# Functionalities:
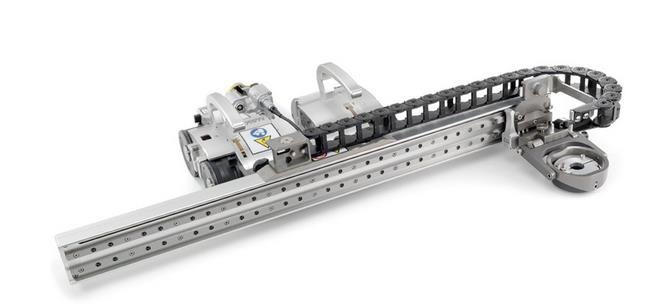
# Advanced Corrosion mapping and remote corrosion mapping:
The Mobile Robot, in conjunction with the motorized raster arm, is engineered to assist in the identification of variations in material thickness due to corrosion. The Mobile Robot - Corrosion Mapping Scanner will follow specific scan paths which are programmed using the remote handheld controller. Perform precision c-scans, line scans, HydroFORM and more using the wide variety probe holders available.
# Tank Scanner:
Deliver state-of-the-art thickness inspection results with the Mobile Robot - Tank Scanner. Paired with the actuated probe lift, the Mobile Robot operates remotely at a distance of up to 30 m (100 ft), while offering steering control and the ability to raise and lower the probe. Powerful, magnetic wheels, drive vertically (and inverted) along the ferrous surfaces of tanks and vessels.

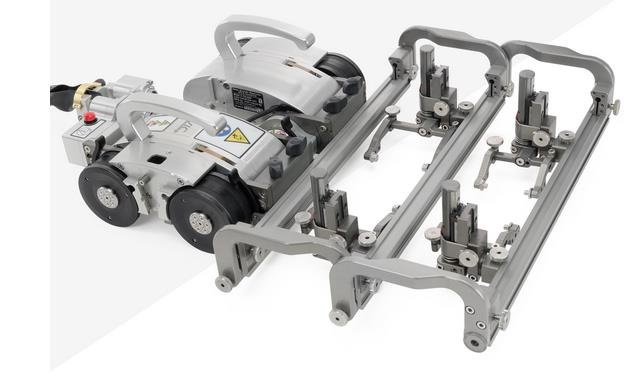
# Weld Scanner:
Track welds circumferentially or longitudinally with up to 6 probes. Follow welds with the steerable, remote operated Mobile Robot - Weld Scanner, equipped with magnetic wheels which allow vertical and inverted weld inspection to be performed with ease. Various probe holder frames expand the weld scanning possibilities. From low-profile for restricted access to spiral welds and long seam inspection, the Mobile Robot is the industry leader in non-destructive testing for weld inspection.
# Visual Inspection:
By adding a camera to the robot, we can perform visual inspection as well.
# Other kinds of robotic inspections
# CCTV Pipe Crawlers
Another type of mobile robot for visual inspection of water pipes in the DT340 of Deep Trekker, another canadian company. They are not specialized in NDT but visual inspection. The principal benefit on my view is the long range, reaching up to 5

They also have Electromagnetic crawlers with 50m underwater reach:

# The Market
Some of the market opportunities are listed below:
Any Storage tank needs corrosion mapping and weld inspection, so this is a big market for this product.
Ports of Auckland also have the need to inspect ship hulls for corrosion mapping.
Automated pipeline inspection on any project.
New Zealand Steel tower inspection or NewCrest Lihir Oxygen tower.
Storage Spheres
Water pipe inspection (Bureau Veritas is currently looking forward for a bid with New Zealand's company Genesis for Unmanned tunnel inspection )
# Timeline for Key Milestones
Assessment
Summary
Requirements
Milestone
Completed
Report